



ما در این مطلب به مبحث طراحی چرخ دنده حلزونی می پردازیم. جهت ساخت و طراحی انواع چرخ دنده، کوپلینگ، اسپیسر، رولیک، شافت، فلنج، بوش،نازل و …. می توانید با مشاوران و کارشناسان آکو صنعت کیان تماس بگیرید.
طراحی چرخ دنده حلزونی
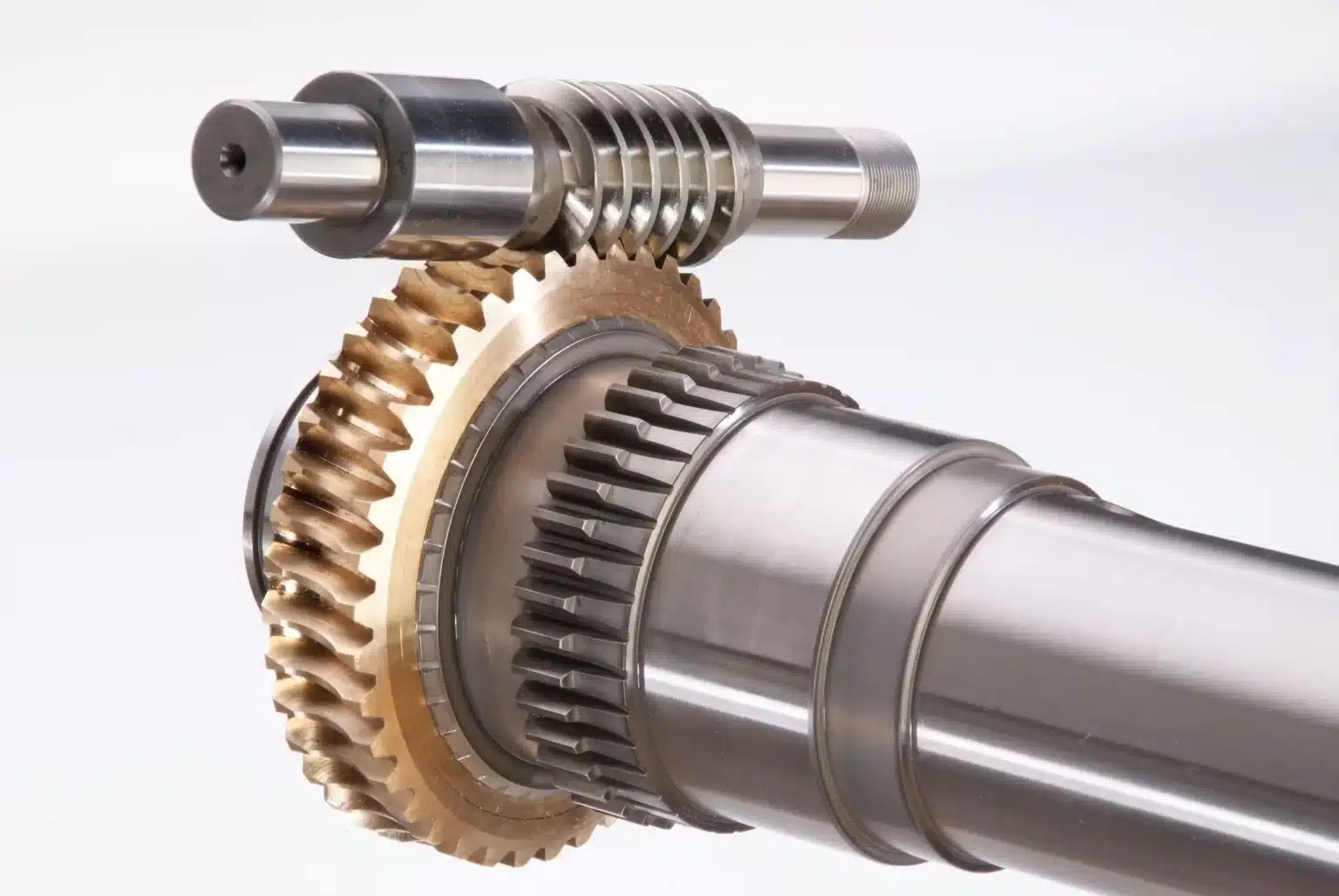
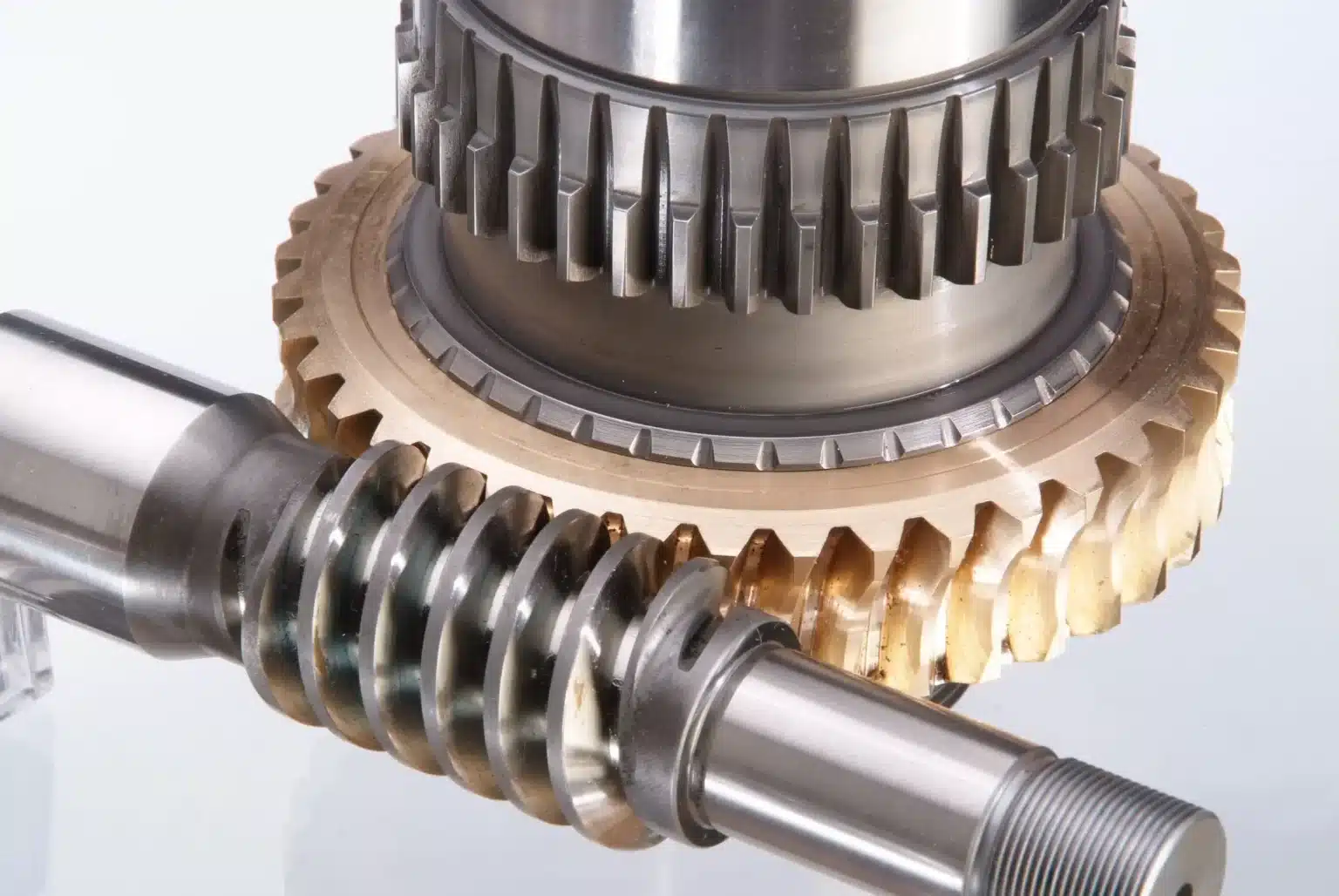
زمانی که نیاز به کاهش زیاد سرعت وجود دارد، ساخت چرخ دنده حلزونی راه حل مناسبی است. این نوع چرخ دنده از یک کرم و یک چرخ کرم تشکیل شده است. در این حالت زاویه بین دو محور 90 درجه است و این دو محور در مقابل یکدیگر قرار دارند. معمولاً مواد حلزون از فلز سخت انتخاب می شود.
در حالی که چرخ دنده حلزونی از فلزات نرم مانند آلیاژ آلومینیوم برنز ساخته شده است. درگیر شدن مارپیچ و مارپیچ به ترکیبی از غلتیدن و لغزش منجر می شود. حتی در نسبتهای کاهش بالا، لغزش بر رول غالب است.
در نتیجه اصطکاک و حرارت ایجاد می شود و راندمان مجموعه دنده کاهش می یابد. وجود لغزش و استفاده از فلزات مختلف باعث می شود که چرخ دنده مارپیچ به نرمی درگیر شود. بنابراین در کاربردهایی که صدا باید به حداقل برسد مانند آسانسورها از چرخ دنده های مارپیچ استفاده می شود. قرقره میله ماهیگیری و پیچ تنظیم گیتار نیز نمونه هایی از کاربردهای این نوع چرخ دنده هستند.
نسبت کاهش سرعت در چرخ دنده حلزونی
در اکثر انواع چرخ دنده ها، کاهش دنده به عنوان تابعی از قطر دو چرخ دنده درگیر تعریف می شود. اما در نوع مارپیچی این نسبت با تعداد مسیرهای مارپیچی و تعداد دندانه های مارپیچی تعیین می شود. به شکل زیر توجه کنید. در یک مارپیچ یک طرفه، هر چرخش کامل مارپیچ (360درجه)، دنده را با یک دندان به جلو می برد. بنابراین، به عنوان مثال، اگر تعداد دندانه های چرخ دنده،24بنابراین، نسبت کاهش دنده برابر است با 24:1خواهد بود نسبت کاهش دنده برای یک مارپیچ چند مسیره با تقسیم تعداد دندانه های مارپیچ بر تعداد آهنگ های مارپیچ تعریف می شود.
پارامترهای هندسی چرخ دنده حلزونی
معمولاً زاویه مارپیچ در مارپیچ و چرخ مارپیچ با یکدیگر متفاوت است. در بیشتر موارد، زاویه مارپیچ روی مارپیچ بزرگ و زاویه مارپیچ روی چرخ مارپیچ کوچک است. زاویه پیشروی حلزون با λو زاویه پیشروی چرخ مارپیچ ψG نشان می دهیم، این دو زاویه مکمل یکدیگر هستند. برای تعیین گام در یک مجموعه چرخ دنده حلزونی، گام محوری گام دایره ای pt می دهیم اگر زاویه محور 90 درجه باشد، این دو مقدار برابر هستند. قطر گام در چرخ کرم مانند چرخ دنده ساده است.
در شکل می بینیم که قطر گام حلزون به تعداد دندان هایش ارتباطی ندارد. به طور کلی، قطر زمین حلزون درفاصلهC0.8753.0≤dW≤C0.8751.7 قرار میگیرد.
بهینه قرار میگیرد. پیشروی L و زاویه پیشروی λ را میتوان با استفاده از رابطههای زیر به هم تبدیل کرد.
L=pxNW, tanλ=LπdW
محاسبه نیروها در چرخ دنده حلزونی
اگر اصطکاک را نادیده بگیریم، تنها نیرویی که بر کرم وارد می شود از چرخ کرم استw سه جزء این نیرو در جهت محورهای مختصات نشان داده شده است. با کمک هندسه شکل می توان این سه جزء را به صورت زیر استخراج کرد.
Wx=Wcosϕnsinλ Wy=Wsinϕn Wz=Wcosϕncosλ
نیروهای وارد بر کرم و چرخ دنده حلزونی به ترتیب با W و G نشان داده می شوند. مولفه Wy نیروی شعاعی است که به هر دو دنده اعمال می شود. زاویه محور را 90 درجه فرض می کنیم. در این حالت نیروی مماسی حلزون Wx است. همچنین مولفه Wz هم نیروی مماسی وارد شده به پیچ و هم نیروی محوری وارد بر چرخ پیچ را نشان می دهد. از آنجایی که نیروهای کرم و چرخ کرم در جهت مخالف وارد می شوند، می توان روابط زیر را نوشت.
همانطور که می بینید، محور چرخ دنده حلزونی با محور x موازی است محور حلزون در راستای محور است قرار دارد در بحث چرخ دنده های ساده حرکت یک دندان نسبت به دندانی که با آن جفت می شود به صورت غلتشی است. اما در اینجا، حرکت نسبی بین کرم و چرخ کرم کاملاً کشویی است. اصطکاک نقش مهمی در چرخ دنده مارپیچ دارد و در عملکرد آن موثر است. با توجه به شکل، زمانی که نیروی عمود بر پروفیل مارپیچ دندان، نیروی اصطکاک برابر است با ایجاد می شود در نتیجه سه جزء نیروی W با در نظر گرفتن اصطکاک به صورت زیر خواهد بود.
راندمان چرخ دنده حلزونی
کارایی چرخ دنده مارپیچ به عنوان نسبت نیروی مماسی وارد شده به مارپیچ در حالت بدون اصطکاک به نیروی مماس اعمال شده به مارپیچ در حالت اصطکاک تعریف می شود. در حالت اول،f=0 است در نتیجه با توجه به رابطه قبلی کارایی چرخ دنده مارپیچ به صورت زیر بدست می آید.
سرعت خطی چرخ حلزون را با VG و سرعت خطی حلزون را با VW نشان میدهیم. در این حالت با توجه به شکل بالا، سرعت نسبی به این صورت قابل محاسبه است.
VW=VG+VS VS=VWcosλ
نسبت چرخ دنده حلزونی معمولاً بین 5:1 تا 75:1 تغییر میکند. در این حالت، راندمان نیز در بازه 50 تا ۹۰ درصد است. زاویههای پیشروی در حلزون و چرخ حلزون براساس جدول زیر طراحی میشوند.
اکنون اگر زاویه پیشروی حلزون را از ۱ تا ۳۰ درجه تغییر دهیم و ضریب اصطکاک را f=0.05 فرض کنیم، میتوانیم راندمان چرخ دنده حلزونی را در این حالتها به دست آوریم. این نتایج در جدول زیر ارائه شده است.
ساخت انواع چرخ دنده در تهران، ساخت چرخ دنده ماردون، طراحی کوپلینگ، ساخت اسپیسر، ساخت دنده جناقی در ایران، ساخت کوپلینگ پره ای در چهاردانگه، ساخت کرانویل در چهاردانگه،ساخت ساپورت در تهران، طراحی رولیک، ساخت ساپرت در ایران، ساخت فلنج در تهران، ساخت فلنج، ساخت نازل در ایران، طراحی بوش، ساخت دنده حلزونی در تهران، ساخت انواع چرخ دنده در تهران،ساخت نازل در تهران،ساخت بوش در تهران، ساخت کوپلینگ پره ای در ایران،ساخت انواع چرخ دنده چهاردانگه، ساخت نازل و ….
جهت ساخت و طراحی انواع چرخ دنده، ساخت کرانویل در تهران، طراحی کوپلینگ، ساخت اسپیسر، ساخت دنده جناقی در چهاردانگه، ساخت کوپلینگ پره ای در چهاردانگه، ساخت کوپلینگ در ایران، طراحی رولیک، ساخت شافت، ساخت زبانه ورودی تهران، ساخت فلنج، ساخت زبانه خروجی در ایران، طراحی بوش، ساخت انواع چرخ دنده چهاردانگه، ساخت نازل و …. می توانید با مشاوران ما در حوزه های مختلف صنعتی و کارشناسان آکو صنعت کیان تماس بگیرید.







